1、 项目名称
小型模块化可重组多功能移动机器人及其开发与仿真平台
2、 项目简介
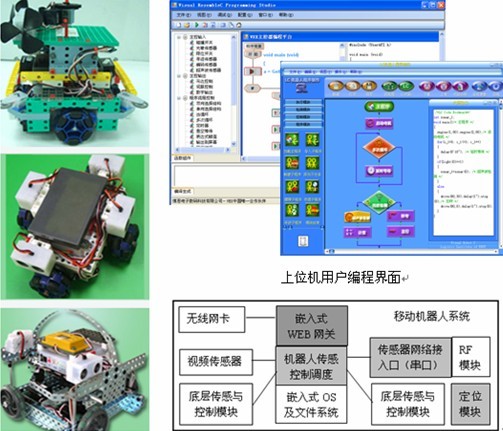
本项目针对目前国内对移动机器人教学、科研和工业应用的实际需求,将机器人的结构、传感与控制等部分模块化,开发新型的移动机器人体系结构和相应的功能模块系统。包括:上位机用户模块;超声波、寻迹、光敏、碰撞、计程器、摄像头等传感器模块;运动控制与驱动明快;底层控制器模块;基于web服务器的无线通讯模块;传感器网络通讯模块;等等。2006年8月本项目研制的第一代移动机器人通过产品的测试和教育部组织的鉴定,整体达到国际先进水平,并已多次参加地区机器人比赛,获得多项冠亚军,本项目的研究成果也已申请多项专利和一项软件著作权。下图为项目截图。
3、 主要技术指标和创新点
(1)具有良好的开放性,可以更具用户的要求更换结构,定制电机,传感器,网卡等模块,可变形成多种类型的机器人。
(2)可作为单机器人使用,也具有多移动机器人协同的能力。
(3)机器人可编程,提供了独特的用户编程界面。
(4)可以通过web方式远程操作移动机器人。
(5)具有和传感器网络集成,采集传感器网络上的数据的能力。
(6)具有和手机通讯的能力。
4、 市场前景
随着人们的生活水平的日益提高,机器人正逐步代替人,在越来越多的行业如危险行业,服务业、教育和工业等场合出现,但从教育机器人的角度,目前我国教育机器人的市场就非常大,各种机器人的比赛层出不穷。而目前具有系列化机器人生产能力的厂家和公司还较少。因此本项目的市场前景将非常广阔。
5、 合作方式
本项目针对目前国内对移动机器人教学、科研和工业应用的实际需求,将机器人的结构、传感与控制等部分模块化,开发新型的移动机器人体系结构和相应的功能模块系统。因此主要合作对象为有志于机器人技术研究与应用推广的企业,可以接受企业委托,也可以通过双方合作,进行多种形式的合作开发。
6、 联系方式
联系地址:武汉理工大学物流工程学院物流与机器人技术实验室
联系人:李文锋
联系电话:027-86535227